Given an m x n grid. Each cell of the grid has a sign pointing to the next cell you should visit if you are currently in this cell. The sign of grid[i][j] can be:
1which means go to the cell to the right. (i.e go fromgrid[i][j]togrid[i][j + 1])2which means go to the cell to the left. (i.e go fromgrid[i][j]togrid[i][j - 1])3which means go to the lower cell. (i.e go fromgrid[i][j]togrid[i + 1][j])4which means go to the upper cell. (i.e go fromgrid[i][j]togrid[i - 1][j])
Notice that there could be some signs on the cells of the grid that point outside the grid.
You will initially start at the upper left cell (0, 0). A valid path in the grid is a path that starts from the upper left cell (0, 0) and ends at the bottom-right cell (m - 1, n - 1) following the signs on the grid. The valid path does not have to be the shortest.
You can modify the sign on a cell with cost = 1. You can modify the sign on a cell one time only.
Return the minimum cost to make the grid have at least one valid path.
Example 1:
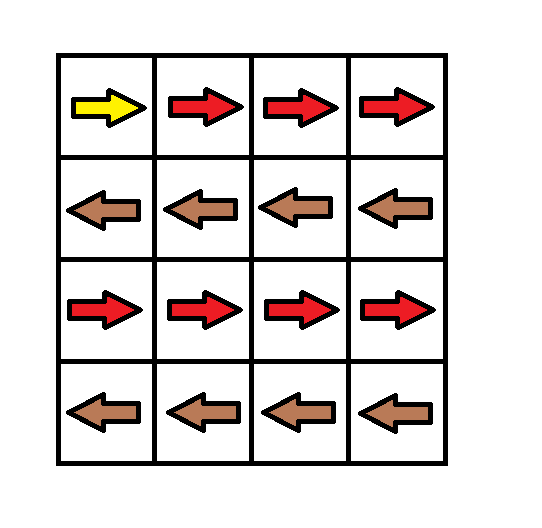
Input: grid = [[1,1,1,1],[2,2,2,2],[1,1,1,1],[2,2,2,2]] Output: 3 Explanation: You will start at point (0, 0). The path to (3, 3) is as follows. (0, 0) --> (0, 1) --> (0, 2) --> (0, 3) change the arrow to down with cost = 1 --> (1, 3) --> (1, 2) --> (1, 1) --> (1, 0) change the arrow to down with cost = 1 --> (2, 0) --> (2, 1) --> (2, 2) --> (2, 3) change the arrow to down with cost = 1 --> (3, 3) The total cost = 3.
Example 2:
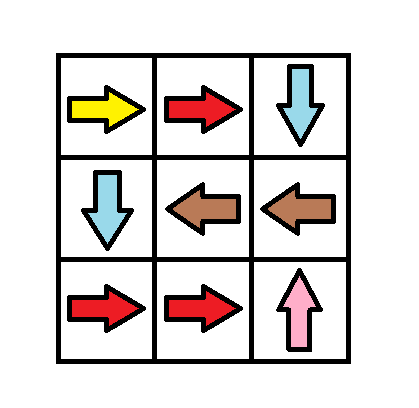
Input: grid = [[1,1,3],[3,2,2],[1,1,4]] Output: 0 Explanation: You can follow the path from (0, 0) to (2, 2).
Example 3:
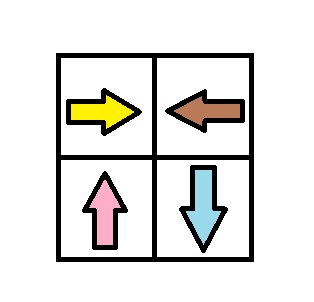
Input: grid = [[1,2],[4,3]] Output: 1
Constraints:
m == grid.lengthn == grid[i].length1 <= m, n <= 1001 <= grid[i][j] <= 4
Companies:
Google
Related Topics:
Array, Breadth-First Search, Graph, Heap (Priority Queue), Matrix, Shortest Path
Similar Questions:
// OJ: https://leetcode.com/problems/minimum-cost-to-make-at-least-one-valid-path-in-a-grid/
// Author: github.com/lzl124631x
// Time: O(MN)
// Space: O(MN)
class Solution {
public:
int minCost(vector<vector<int>>& G) {
int M = G.size(), N = G[0].size(), dp[100][100] = {}, dirs[4][2] = {{0,1},{0,-1},{1,0},{-1,0}};
memset(dp, 0x3f, sizeof(dp));
dp[0][0] = 0;
queue<pair<int, int>> q{{{0, 0}}};
while (q.size()) {
auto [x, y] = q.front();
q.pop();
for (int i = 0; i < 4; ++i) {
int a = x + dirs[i][0], b = y + dirs[i][1];
if (a < 0 || b < 0 || a >= M || b >= N) continue;
int cost = dp[x][y] + (G[x][y] - 1 != i);
if (dp[a][b] > cost) {
dp[a][b] = cost;
q.emplace(a, b);
}
}
}
return dp[M - 1][N - 1];
}
};// OJ: https://leetcode.com/problems/minimum-cost-to-make-at-least-one-valid-path-in-a-grid/
// Author: github.com/lzl124631x
// Time: O(MNlogMN)
// Space: O(MN)
class Solution {
public:
int minCost(vector<vector<int>>& G) {
int M = G.size(), N = G[0].size(), dist[100][100] = {}, dirs[4][2] = {{0,1},{0,-1},{1,0},{-1,0}};
memset(dist, 0x3f, sizeof(dist));
dist[0][0] = 0;
priority_queue<array<int, 3>, vector<array<int, 3>>, greater<>> pq;
pq.push({ 0, 0, 0 });
while (pq.size()) {
auto [d, x, y] = pq.top();
pq.pop();
if (d > dist[x][y]) continue;
if (x == M - 1 && y == N - 1) return d;
for (int i = 0; i < 4; ++i) {
int a = x + dirs[i][0], b = y + dirs[i][1];
if (a < 0 || a >= M || b < 0 || b >= N) continue;
int cost = d + (G[x][y] - 1 != i);
if (cost < dist[a][b]) {
dist[a][b] = cost;
pq.push({ cost, a, b });
}
}
}
return 0;
}
};