{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
A homemade quadcopter recreating a real aircraft cockpit with embedded Arduino, FPV stream, Processing ground interface
Here is the end result :

The quadcopter is entirely custom built from scratch, with a 3S 5'500mAh, MarsPower 920kv motors, 1045 propellers & CC3D flight controller
The quadcopter has an electronic circuit embedded with an Arduino microcontroller sending telemetry data from different sensor (accelerometer MPU6050, gyroscope GY-271, altimeter/pressure sensor BMP180). All the informations are encapsulated in a csv format packet to be sent by a NRF24l01+ 2.4Ghz module to an Arduino on the ground. The Arduino then transfer the data to the Processing program via serial protocol. In parallel an embedded camera streams using a 5.8 Ghz transmitter/receiver that is fed to the Processing program through an RCA to USB adapter. Then the code manages the real time display of the quadcopter instruments.
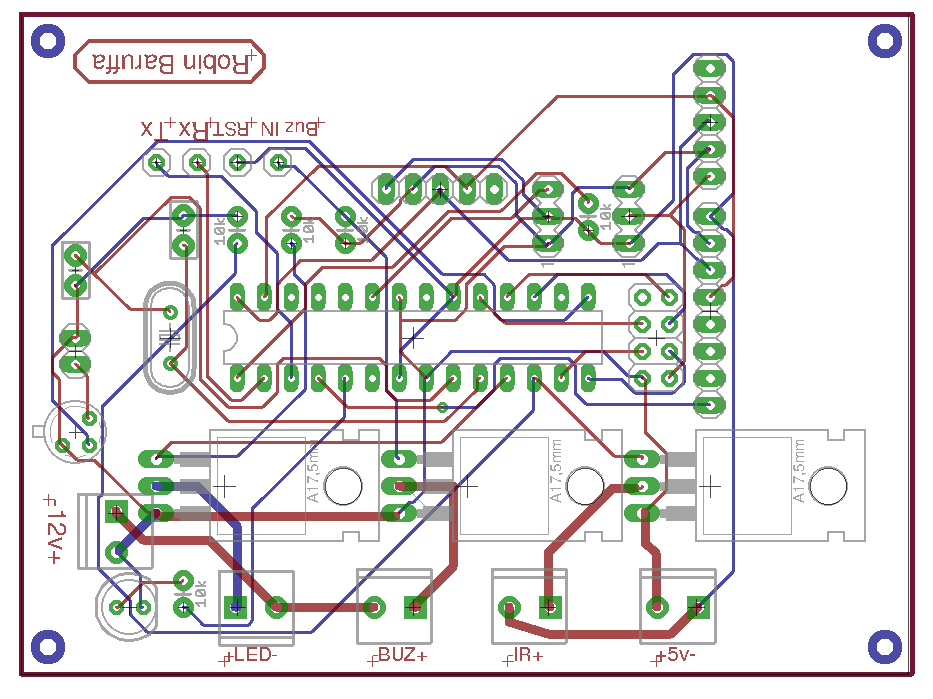
I have designed a PCB with Eagle to support all the sensors and the microcontroller, /!\ this is not tested
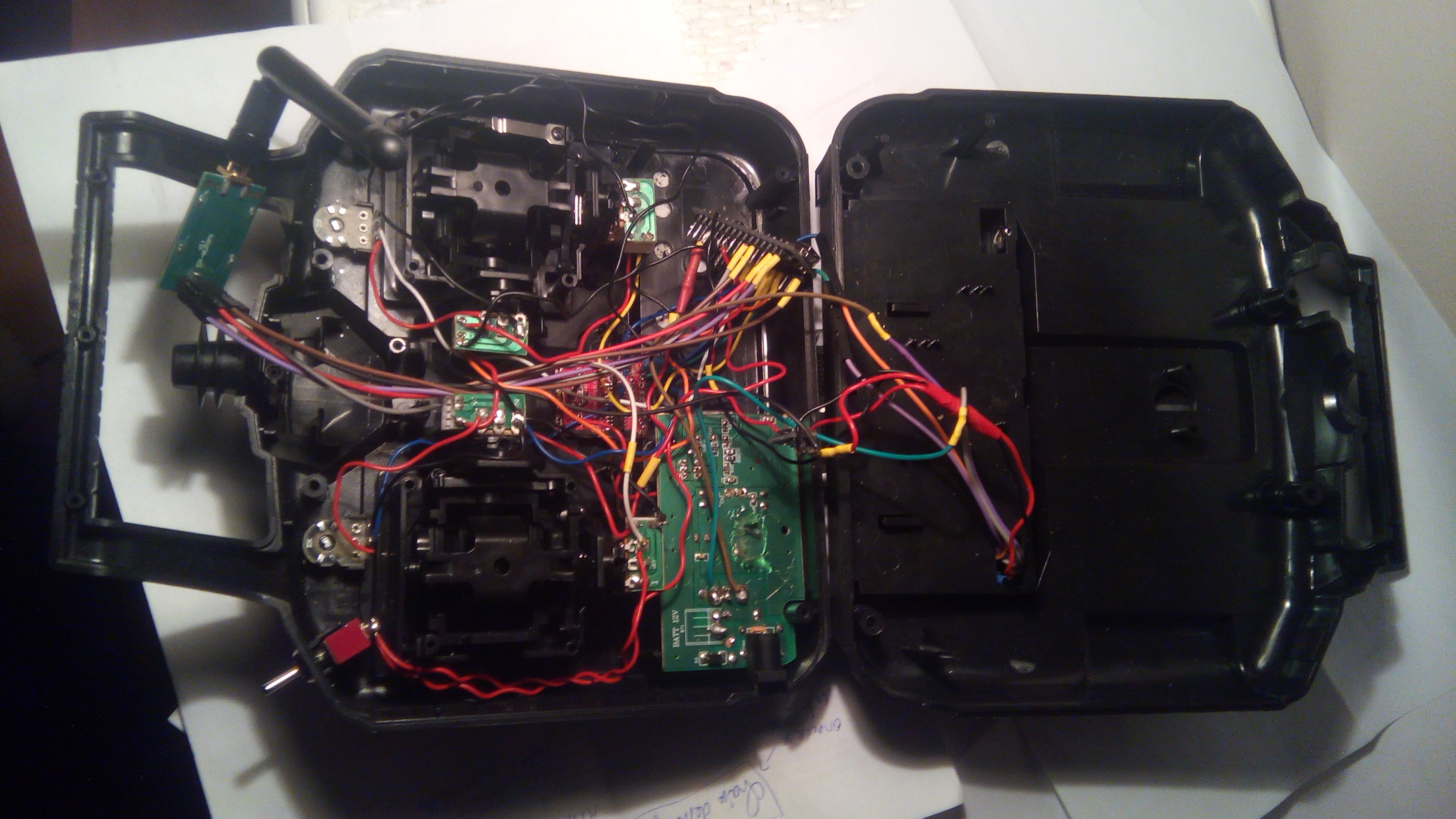
The radio receiver and transmitter has been modified to improve range and battery life
Realized during the ISN course taught at Centre International de Valbonne, CIV, 2016