Build_and_run_example
First, ensure you export the environment variable ARMGCC_DIR which is pointed to directory of tool chain.
cd freertos-tn/boards/${board_name}/demo_apps/hello_world/armgcc/
/build_release.sh
Copy binary file to 1st FAT partition of eMMC:
( Please refer to Use UMS to Update kernel and resize partition )
cp ./release/hello_world.bin ${FAT partation}
Choose to load dts with cortex-m4 support.
setenv fdt_file imx8mq-pico-pi-m4.dtb
setenv m4image hello_world.bin
run m4boot
Choose to load dts with cortex-m7 support.
setenv fdt_file imx8mp-edm-g-wb-rpmsg.dtb
setenv m7image hello_world.bin
run m7boot
You should see the following output from debug console:

First, ensure you export the environment variable ARMGCC_DIR which is pointed to directory of tool chain.
cd freertos-tn/boards/${board_name}/multicore_examples/rpmsg_lite_str_echo_rtos/linux_remote/armgcc
./build_release.sh
Copy binary file to 1st FAT partition of eMMC:
( Please refer to Use UMS to Update kernel and resize partition )
cp ./release/rpmsg_lite_str_echo_rtos_imxcm4.bin ${FAT partation}
Choose to load dts with cortex-m4 support.
setenv fdt_file imx8mq-pico-pi-m4.dtb
setenv m4image rpmsg_lite_str_echo_rtos_imxcm4.bin
run m4boot
boot
Choose to load dts with cortex-m7 support.
setenv fdt_file imx8mp-edm-g-wb-rpmsg.dtb
setenv m7image rpmsg_lite_str_echo_rtos.bin
run m7boot
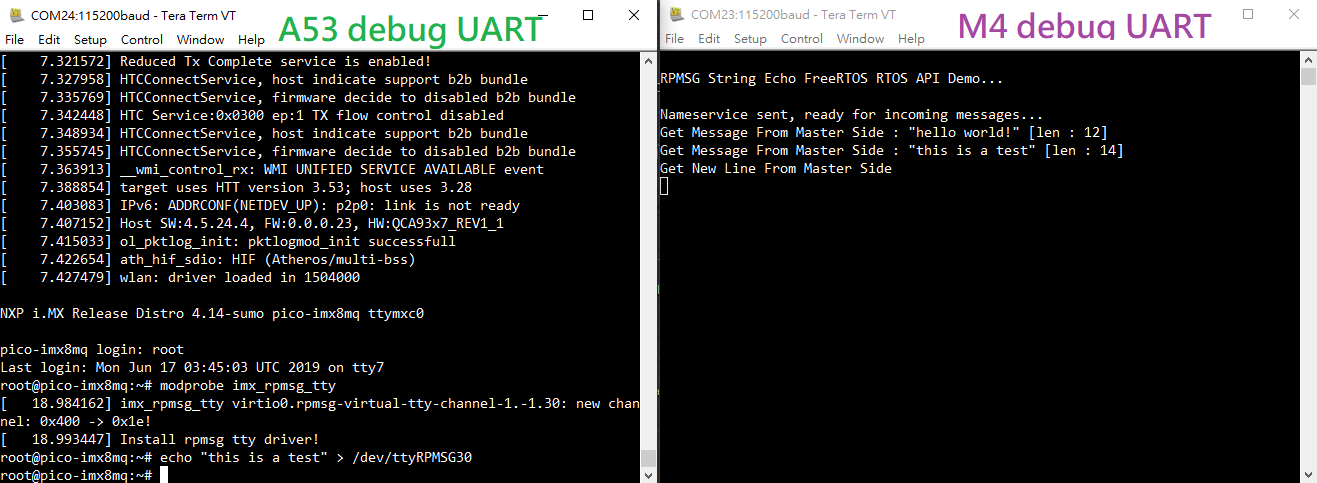
modprobe imx_rpmsg_tty
echo "this is a test" > /dev/ttyRPMSG30
You should see the following output from debug console:
First, ensure you export the environment variable ARMGCC_DIR which is pointed to directory of tool chain.
cd freertos-tn/boards/${board_name}/multicore_examples/rpmsg_lite_pingpong_rtos/linux_remote/armgcc
./build_release.sh
Copy binary file to 1st FAT partition of eMMC:
( Please refer to Use UMS to Update kernel and resize partition )
cp ./release/rpmsg_lite_pingpong_rtos_linux_remote.bin ${FAT partation}
Choose to load dts with cortex-m4 support.
setenv fdt_file imx8mq-pico-pi-m4.dtb
setenv m4image rpmsg_lite_pingpong_rtos_linux_remote.bin
run m4boot
boot
Choose to load dts with cortex-m7 support.
setenv fdt_file imx8mp-edm-g-wb-rpmsg.dtb
setenv m7image rpmsg_lite_pingpong_rtos_linux_remote.bin
run m7boot
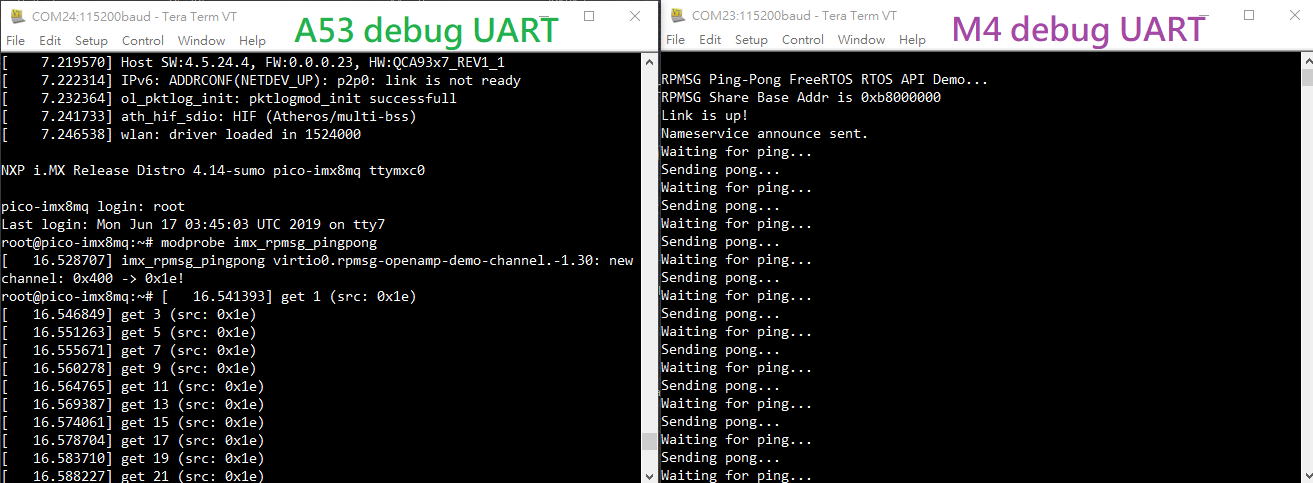
modprobe imx_rpmsg_pingpong
You should see the following output from debug console:
Check kernel message to ensure if the RPMSG driver is initialized properly.
# dmesg
[ 0.428890] imx rpmsg driver is registered.
[ 0.440127] imx8mq-pinctrl 30330000.iomuxc: initialized IMX pinctrl driver
[ 0.454069] MU is ready for cross core communication!
[ 0.458000] virtio_rpmsg_bus virtio0: rpmsg host is online
If there is no information about RPMSG driver, check if you load the correct device tree for M4.