Floor Plan Alignment for Different cameras orientation #6
Comments
|
The 2nd camera looks to have a warped image. Was it correctly calibrated? On 16 October 2013 05:03, drochairobot [email protected] wrote:
|
|
The 2nd camera average reprojection error is 0.37. Only one of the 24 pictures used for calibration has a reprojection error of 0.8. The calibration was made according to procedure, but the data was imported to the new GTS release from the older version, since we don't have support for GigE cams. The cameras are separated by a wall with a door in the middle, where the checkerboard is located and visible by both cameras. |
|
Can you show the unwarped images of each individual cameras calibration? On 16 October 2013 22:13, drochairobot [email protected] wrote:
|
|
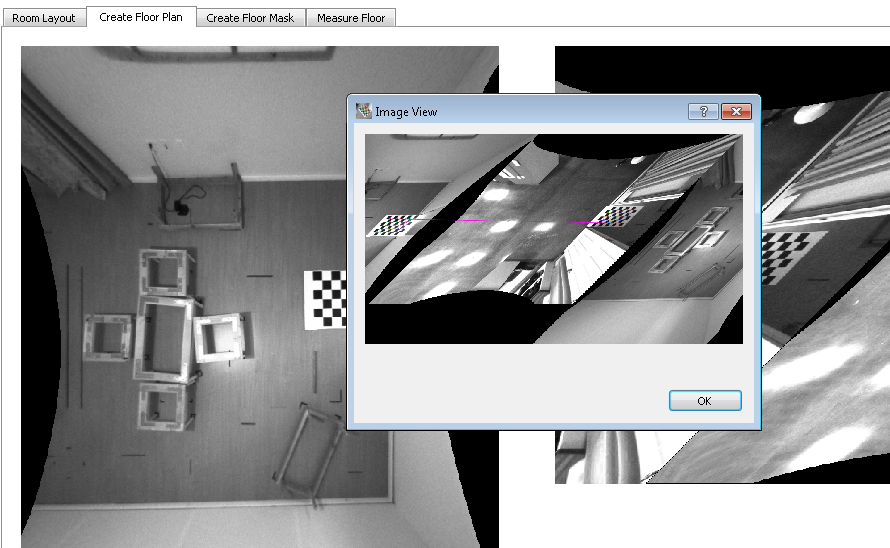
The unwarped image of the 2nd camera is: The unusual image you mention is always like that when the image is tilted to give the correct orientation of the camera, when doing the floor plan. I might send the workbench to you soon. |

|
This is how it looks when creating the floor plan tilting the image: Without tilting it looks like this |


{kind=link}
{kind=link}
{kind=link}
|
This image seems fine. Try retaking it with the checkerboard at 90 degrees. Then try to stitch them.
|
|
Seems to be a bug with the rotation stage. If you rotate again to make it 180, does it look fine? Is this skewing only at 90 degrees?
|
|
Exactly. 0 and 180 looks OK. 90 and 270 is tilted and looks split in the middle. |
|
Which version of software is this? Platform? |
|
0.4.4 on Windows. |
|
Thanks. If I can get a copy of your workbench (please remove videos) that On 17 October 2013 22:35, drochairobot [email protected] wrote:
|
|
I have tested 0.4.7 with the workbench you provided and it resolves this issue. Can you please confirm and then we can close this bug. Thanks |
|
Hi Akram, the alignment on the tracking looks OK now. Creating the room and the floor plan showed no issues. |
|
It is doing this both when we turn and when we don’t turn the images at creating the floor plan for the room. |
|
Hi, Are you able to fix the issue of getting incorrect floor plan image for cameras in different room? Thanks in advance! |
Hi Akram,
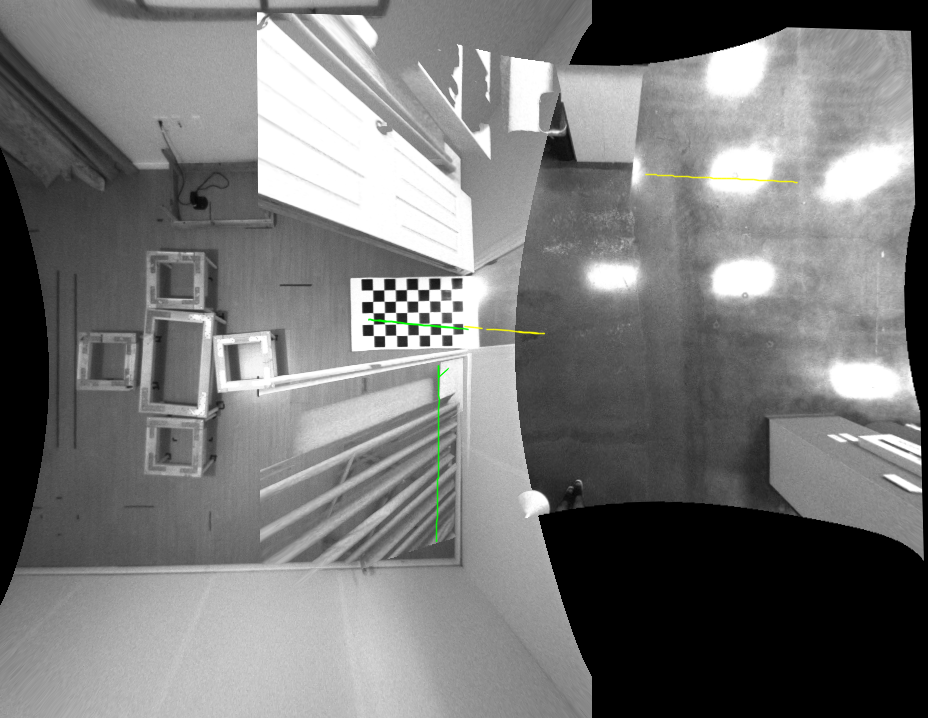
We have a floor plan that includes 2 cameras that have an approximate orientation of 90 degrees between them. When creating the floor plan, it shows a miss-alignment of the checkerboard:
This will result on tracking miss aligned. The next image highlights a trajectory that should be a straight line:

In the case we do not turn the image of the second camera when doing the floor plan, the floor plan and trajectory will appear better aligned,
but the heading output will plot "-1.#.IO" when tracking uses the second camera, making post processing to crash.
Dario
NOTE: i don't think is related to this issue, but we are tracking using a timestamp we generate from the external video source.
The text was updated successfully, but these errors were encountered: