-
Notifications
You must be signed in to change notification settings - Fork 394
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Fix pinhole visualization not working with camera extrinsics & intrin…
…sics on the same path (#2568) <!-- Open the PR up as a draft until you feel it is ready for a proper review. Do not make PR:s from your own `main` branch, as that makes it difficult for reviewers to add their own fixes. Add any improvements to the branch as new commits to make it easier for reviewers to follow the progress. All commits will be squashed to a single commit once the PR is merged into `main`. Make sure you mention any issues that this PR closes in the description, as well as any other related issues. To get an auto-generated PR description you can put "copilot:summary" or "copilot:walkthrough" anywhere. --> ### What Our recent transform reform (as landed in 0.7) allows us to log pinhole and transform on the same entity. By convention we first apply transform3d then pinhole as-if transform3d was higher in the hierarchy. This was already the case, but the displayed pinhole frustum was broken. I used this to simplify the object hierarchy in both the rust and python objectron. While doing so I noticed that Rust objectron didn't have the half-box fix applied yet we had on the Python version. 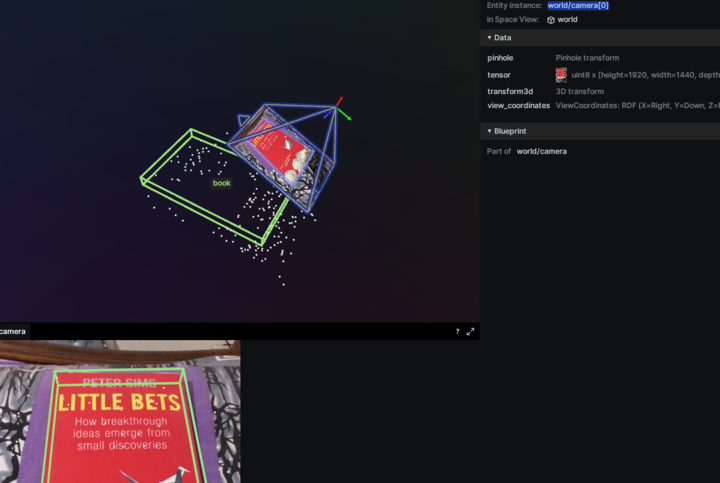 ### Checklist * [x] I have read and agree to [Contributor Guide](https://github.com/rerun-io/rerun/blob/main/CONTRIBUTING.md) and the [Code of Conduct](https://github.com/rerun-io/rerun/blob/main/CODE_OF_CONDUCT.md) * [x] I have tested https://demo.rerun.io/pr/2568 (if applicable) <!-- This line will get updated when the PR build summary job finishes. --> PR Build Summary: https://build.rerun.io/pr/2568 <!-- pr-link-docs:start --> Docs preview: https://rerun.io/preview/3284fda/docs Examples preview: https://rerun.io/preview/3284fda/examples <!-- pr-link-docs:end -->
- Loading branch information
Showing
3 changed files
with
26 additions
and
21 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
4c4a5d4There was a problem hiding this comment.
Choose a reason for hiding this comment
The reason will be displayed to describe this comment to others. Learn more.
Possible performance regression was detected for benchmark 'Rust Benchmark'.
Benchmark result of this commit is worse than the previous benchmark result exceeding threshold
1.25.batch_points_arrow/encode_log_msg90442ns/iter (± 361)49579ns/iter (± 119)1.82This comment was automatically generated by workflow using github-action-benchmark.