Wizard of Oz demo
Warning: Unplug the Kokam (the one that says CHARGE) and Segway charging cables if you want to navigate around with the robot!!!
This demo lets the user control Vizzy's mobile base (manually or automated), perform simple gestures (wave and handshake), gaze at a target, and speak. For this demo Vizzy needs to have vizzy_speech installed (unless it has been recently formated, you don't have to care about this).
- Required YARP applications (right click on each Module and hit run):
- On Entities -> Application -> Vizzy_Startup_with_ROS (double click to open window):
- yarprobotinterface (the robot will move to calibrate!)
- yarpidl_rosmsg
- vizzyUpperBodyJoints
- vizzy_iKinGazeCtrl
- fixationPointStatusBridge
- fixationPointActionBridge
- On Entities -> Application -> Vizzy_Startup_with_ROS (double click to open window):
On a terminal connected to vizzy-desktop (though ssh or mosh):
roslaunch vizzy_speech_servers fullWozSystem.launch
or, if you want to use a map called my_map you run this (check the Creating a map tutorial to learn how to create maps):
roslaunch vizzy_speech_servers fullWozSystem.launch map_file:=my_map.yaml obstacles_map_file:=my_map_obst.yaml
On a terminal on vizzy-laptop:
rosrun rviz rviz
We recommend loading the following Rviz configuration:
File-> Open config -> /home/vizzy/catkin_ws/src/vizzy_demos/rviz/wizard_of_oz.rviz
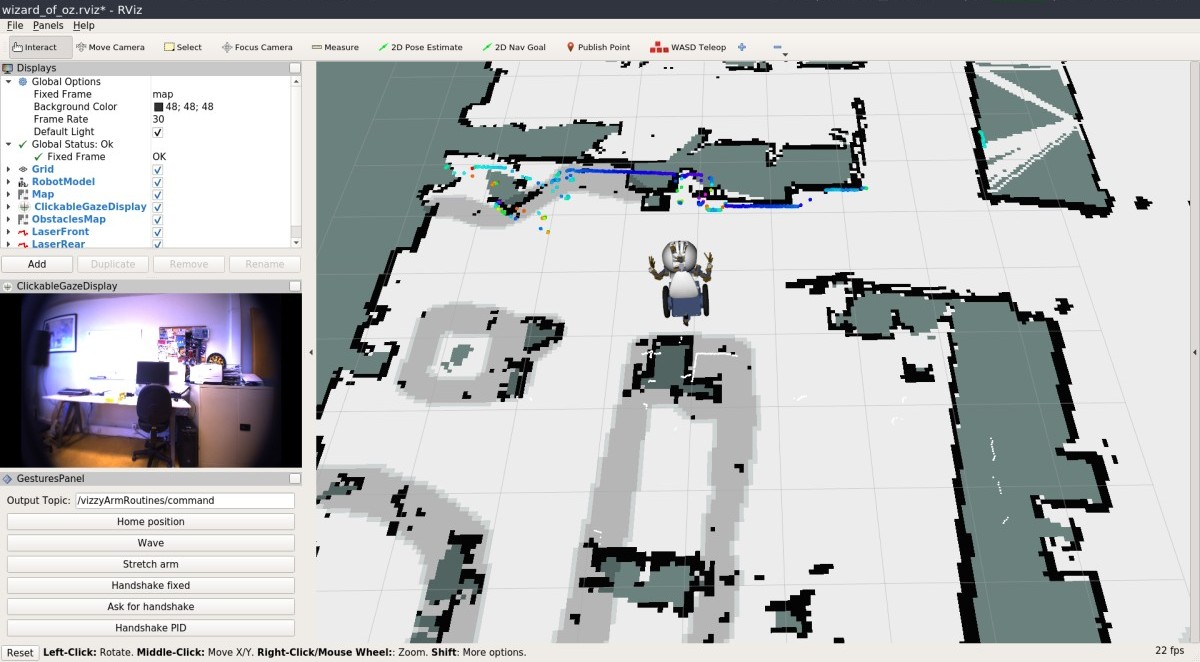
With the ClickableGazeDisplay you can direct Vizzy's gaze with a left click on the image.
With the gestures panel the Wizard can Wave at people and give them a handshake. To perform a successful handshake follow the following steps:
- Stretch arm and wait for a person to grab Vizzy's hand
- Handshake fixed
You can see a demo handshake below:
Since Vizzy's tactile sensors have been changed and are not well calibrated please DO NOT use the Handshake PID button.
Vizzy's speaker is on its head. Check the following gif to see how to turn it on.

Afterwards be sure that sound is ok. Start by checking the sound levels with (use what better fits the demo):
alsamixer
You should hear Vizzy breathing every 7 seconds.
The easiest way to speak with Vizzy is using the vizzy_web_oz interface from vizzy_speech package. To use it you need a device connected to Vizzy_5G network.
You can access the speech interface from a web browser on the following address: http://10.10.1.80/vizzy_web_woz/index.html
For that to work your device needs to be configured on Vizzy's network (see the subsection bellow).
Previously to going to a place without internet you should cache all predefined utterances. If the robot cannot speak one of the utterances (because its not on cache and it does not have internet) it will cough.
You can also write down custom utterances but you need internet for that.
Since Vizzy_5G does not have DHCP you need to manually assign an IP to your device if you have not connected to Vizzy_5G before. Obviously your IP need to be unique on the network. I would recommend something like: 10.10.1.1XX (like 10.10.1.112 or 10.10.1.129).
- On Vizzy laptop
Nothing to be done. Everything is configured!
- Manually configuring Vizzy_5G on Ubuntu
Just watch the following animations:

- Manually configuring Vizzy_5G on Android
- Go to Settings
- Tap Network & internet Wi-Fi.
- Go to the bottom of the list and tap Add network.
- Enter the network SSID: Vizzy_5G
- On security choose WPA/WPA2 PSK and enter Vizzy_5G password
- Tap Show advanced options
- Tap IP settings and choose static
- On the IP address write the disered IP for your device (for instance 10.10.1.111)
- On gateway write 10.10.1.254
- Network prefix lenght: 16
- DNS 1: 10.0.0.1
If Vizzy_5G does not work (you have a crappy tablet/computer/phone), try using Vizzy network instead
